Physical AI&ロボティクス開発サービス
デジタルのAIを、
現場の動作へ。
AIを物理世界に実装するためのロボティクスシステムを、高い技術力と提案力を持って導入します。 製造業・物流・ラボなどの現場で、知覚・判断・制御を統合し、 自律的に動作するシステムによって現場の課題を解決します。
対応可能な技術領域
ヒューマノイド・四足歩行ロボットから、VLAなどの基盤モデル、ハンドの二次開発、データ収集まで。 Physical AIの実装に必要な技術を一貫して提供します。
01
ヒューマノイド、四足歩行ロボットのPoC
ヒューマノイドや四足歩行ロボットを用いた実機検証(PoC)を、企画から実装・評価まで一貫して支援します。
02
VLA / WAM の現場適用
VLA(Vision-Language-Action)や WAM といった基盤モデルを、現場のタスクに合わせて適用・検証します。
03
デクステラスハンドの二次開発
多指ハンド(デクステラスハンド)のカスタマイズ・二次開発や、タスク専用ハンドの設計・製作に対応します。
04
データ収集パイプラインの構築
学習・評価に必要な動作・センサーデータの収集から前処理までのパイプラインを構築します。
実績
ヒューマノイドロボットの実機開発で成果を上げています。
HUMANOID HACK TOKYO 2026 ・ 優勝
ヒューマノイドハッカソンで優勝
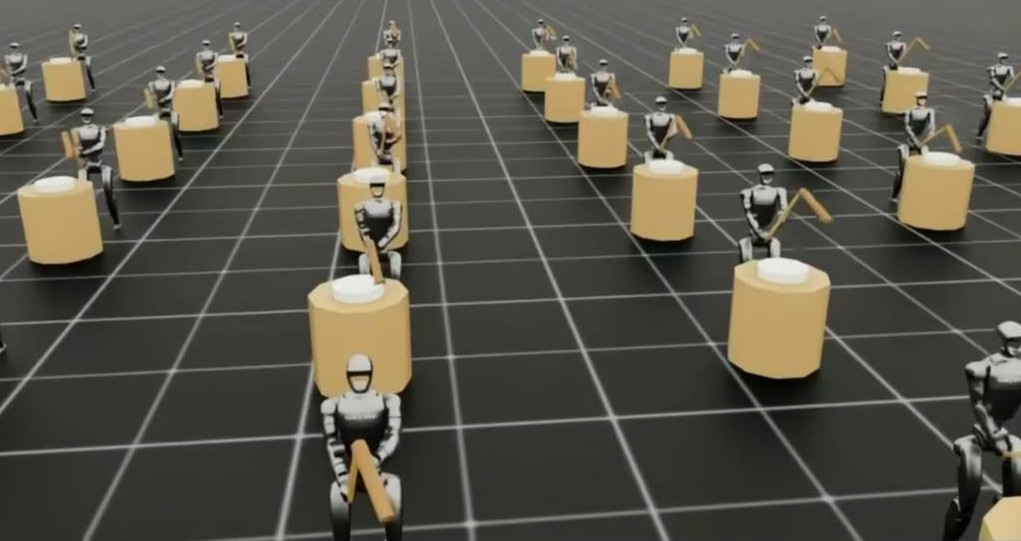
2026年5月30日・31日、GMOヒューマノイドラボ(渋谷セルリアンタワー)で開催されたヒューマノイドハッカソン 「HUMANOID HACK TOKYO」(主催:Orboh)で優勝しました。 人とヒューマノイドロボットが呼吸を合わせて作業する「人機協調(Human-Robot Collaboration)」をテーマに、協調餅つきを実機で実演。 専用のモーションキャプチャ装置を使わず動画から動作を生成するパイプライン、シミュレーション上の強化学習による動作最適化、 餅つき用の独自ハンドの3Dプリンター設計・製作などを実装しました。
ヒューマノイド人機協調Video → Motion強化学習Isaac Sim独自ハンド設計